|
|||||||||||||
|
|||||||||||||
|
|||||||||||||
|
Fermilab and KEK scientists recently hooked up a new cavity tuning system to the various cavities in the so-called cavity-tuner zoo at KEK. This zoo, comprising eight superconducting radiofrequency cavities fabricated by four different vendors from three different regions, was the testing ground for a new development in what is called Lorentz force detuning (LFD) compensation.
Lorentz force detuning is an unwelcome phenomenon that rears its head when the superconducting radiofrequency (RF) cavity is simply turned on. As soon as RF power courses through the walls of the metal cavity, repulsive electromagnetic forces, or Lorentz forces, push apart charged particles in the metal. When the cavity is first manufactured, it's just the right shape to allow a particle beam to accelerate smoothly down its axis. But all the Lorentz force particle-pushing results in a deformation of the cavity wall, causing the cavity to be misshapen. The change is slight – the cavity is compressed only a few microns along its one-metre length – but is still enough to throw a wrench into its efficient operation. The wrench takes the form of mismatched frequencies, the frequency of the RF power pulses being at odds with the resonant frequency of the cavity. That mismatch means that not all of the RF power will get to the cavity; some will be reflected from the cavity and therefore wasted. Without enough power, the particle beam can not accelerate through the RF cavity. The situation is similar to one in which one person pushes another seated in a swing. If the first person repeatedly pushes at same time in the swing cycle, matching the swinger's frequency, the swinger will enjoy a smooth, steady ride. But if the pusher doesn't match the swinger's natural beat, his work won't translate into nice, regular cadences, and the swinger will suffer a choppy ride. A Fermilab team, led by Yuriy Pischalnikov and Warren Schappert, developed a sophisticated control algorithm for correcting the RF mismatch problem so that all the power intended for the cavity can also be transmitted to it. The two scientists, along with a team of KEK scientists, tested the system at KEK earlier this month. “The test went very well,” said Schappert. A typical resonant frequency for the RF cavities is 1.3 gigahertz, or 1.300.000.000 hertz. In the tests at KEK, the compensation system was able to compensate for the detuning to within a mere 10 hertz of the desired frequency, or to within 30 nanometres of the desired length. The system's four different tuner options worked equally successfully on six different RF cavities.
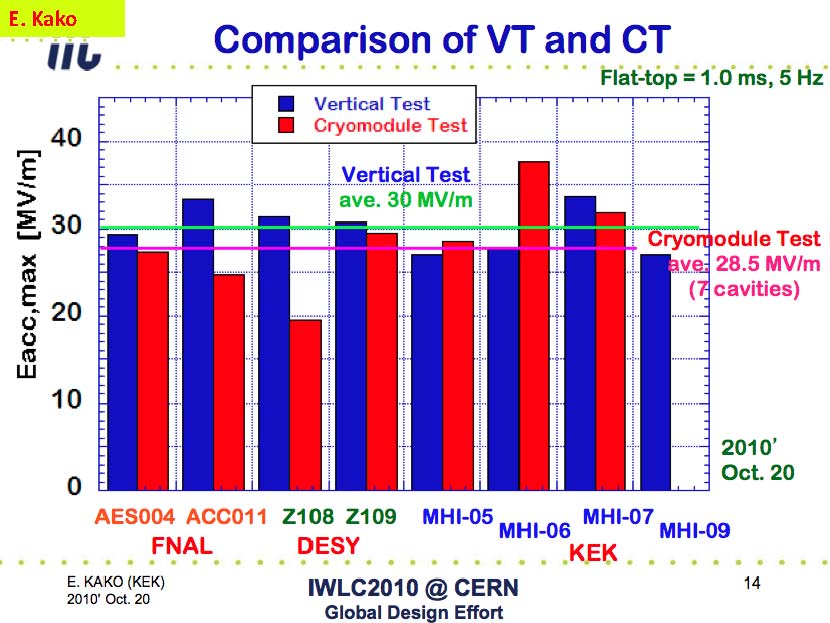
“That's a very good result,” said Pischalnikov. The characterisation of the various cavities' responses to the LFD compensation system will help make a determination as to which, if any, may be used in the ILC. The system works by measuring the amount of the cavity's inevitable deformation once it's turned on. A compensation algorithm calculates how much the cavity must be stretched in order to make up for that deformation and the resultant detuning. “We control the vibration incurred by the power input to the cavity using a ceramic crystal,” said Pischalnikov. That crystal, called a piezoelectric device, is the system's mover and shaker. The piezoelectric device, receiving information about the cavity's shortened length, initiates an expansion of the cavity, pushing the two ends of it apart. The walls are re-formed to very close to the optimal shape, the correct frequency is achieved and the detuning of the cavity is compensated for. Fermilab's LFD compensation system is automated and self-adapting, making a correction to the algorithm with each iteration of the deforming RF pulse. After each re-formation, the algorithm better predicts how much it will have to stretch the cavity. “You can set it and forget it,” said Schappert. The test was part of a programme called S-1 global, a set of experiments in which up to eight cavities from three regions – the Americas, Asia and Europe – are installed in cryostats and operated together. The programme allows scientists to approach the cavity data in a cumulative way and test individual cavity components from the different laboratories. The international team is currently conducting a study to cool down the S-1 global cryomodule, two combined cryomodules, to 2 kelvins. The KEK team is also testing the voltage gradients of the S-1 global cryomodules. They've achieved promising results, in one case exceeding a target gradient of 35 megavolts per metre (MV/m). “We had a good result for the vertical test, 30 MV/m in an average accelerating gradient of eight cavities. We also had a very good result of an average of 28 MV/m for the cryomodule test, which is only two megavolts per metre less than the vertical test,” said Eiji Kako, the KEK scientist leading the S-1 global effort at KEK's Superconducting RF Test Facility STF. “One of the KEK cavities fabricated by Mitsubishi Heavy Industry did especially well. We reached an accelerating gradient as high as 39 MV/m. We are very satisfied with the results.” The battery of tests at S-1 global will continue. Stay tuned to ILC NewsLine for updates. -- Leah Hesla and Rika Takahashi |
|||||||||||||
| © International Linear Collider |